* Add detailed hardware info for Helios64
- Button
- Ethernet
- Front Panel
- GPIO
- I2C
- Jumper
- LED
- M.2
- PMIC
- PWM Fan
- RTC
- SATA
- SPI
- UEXT
- UPS
- USB
* Cosmetic upgrade and adapt to latest mkdocs-material version
Co-authored-by: nurix <nurix@pnsnc.local>
Co-authored-by: Aditya Prayoga <aditya@kobol.io>
1.8 KiB
PWM Introduction
PWM, or pulse width modulation is a technique which allows us to adjust the average value of the voltage that’s going to the electronic device by varying duty cycle of the power at a fast rate.
The term duty cycle describes the proportion of 'on' time to the regular interval or 'period' of time; a low duty cycle corresponds to low power, because the power is off for most of the time. Duty cycle is expressed in percent, 100% being fully on. When a digital signal is on half of the time and off the other half of the time, the digital signal has a duty cycle of 50% and resembles a "square" wave. When a digital signal spends more time in the on state than the off state, it has a duty cycle of >50%. When a digital signal spends more time in the off state than the on state, it has a duty cycle of <50%. Here is a pictorial that illustrates these three scenarios:

PWM Fan Implementation
Type-A

Type-B

Type-C

PWM Fan Schematic
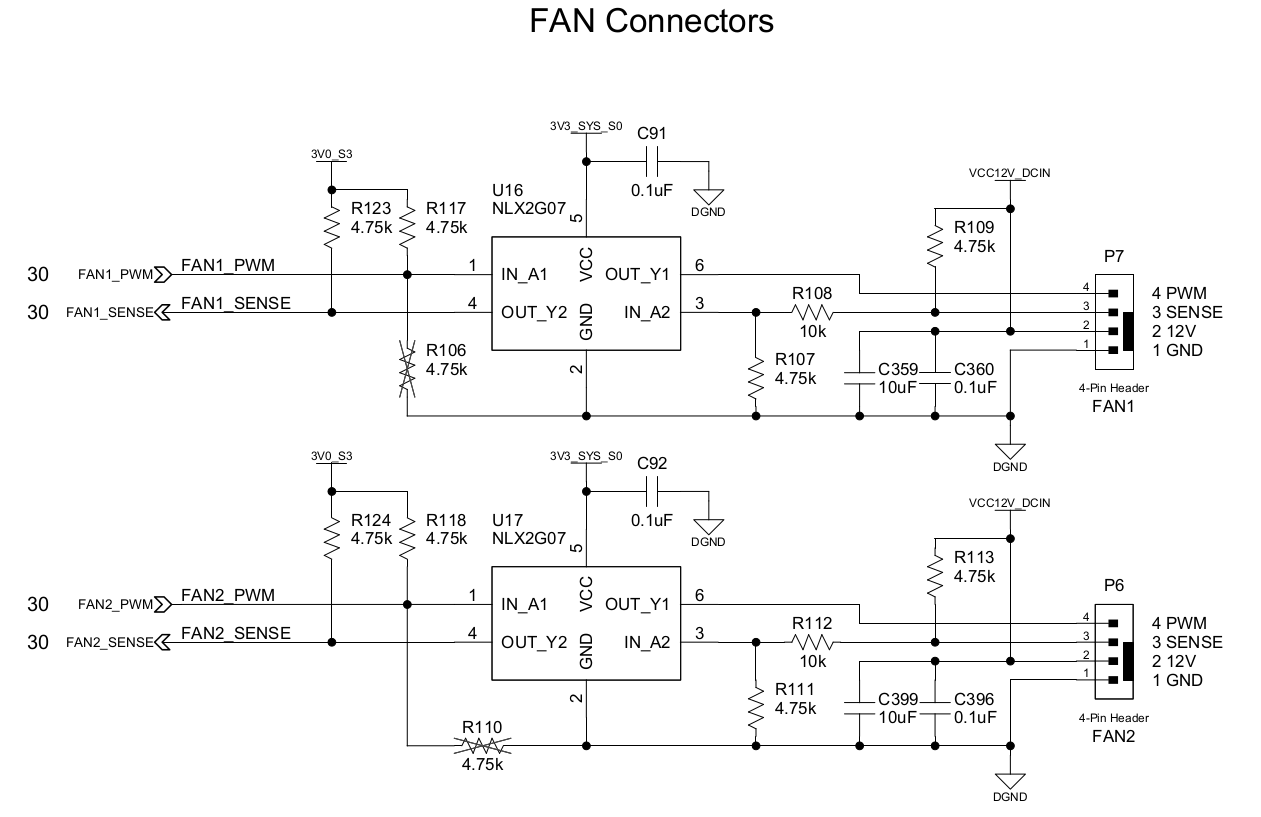
Remarks
| Description | Header P7 | Header P6 | Remarks |
|---|---|---|---|
| PWM pin | PWM0 | PWM1 | 5V tolerant |
| SENSE pin | GPIO4_C5 | GPIO4_C7 | no kernel module/userspace apps that make use of this pin yet |
| PWM Frequency | 25 kHz | 25 kHz | defined in device tree |
PWM Fan Connector

Connector Pinout
| Pin | Function | Wire Color |
|---|---|---|
| 1 | GND | Black |
| 2 | 12V | Red |
| 3 | Sense | Yellow |
| 4 | Control | Blue |